
螺絲擰緊的全自動(dòng)化,降低投入·提高生產(chǎn)性
工藝介紹
隨著購車群體年齡的年輕化,汽車外飾正在不斷追求潮流與創(chuàng)新,導(dǎo)致汽車外飾制造商之間的競爭也愈發(fā)劇烈,一方面生產(chǎn)成本的壓力增加,另一方面產(chǎn)品迭代的速度加快,并且在品質(zhì)、性能等綜合要求面臨越來越大的挑戰(zhàn),如何通過改善這些問題,從而增加產(chǎn)品自身的競爭力,成為了重要的課題。
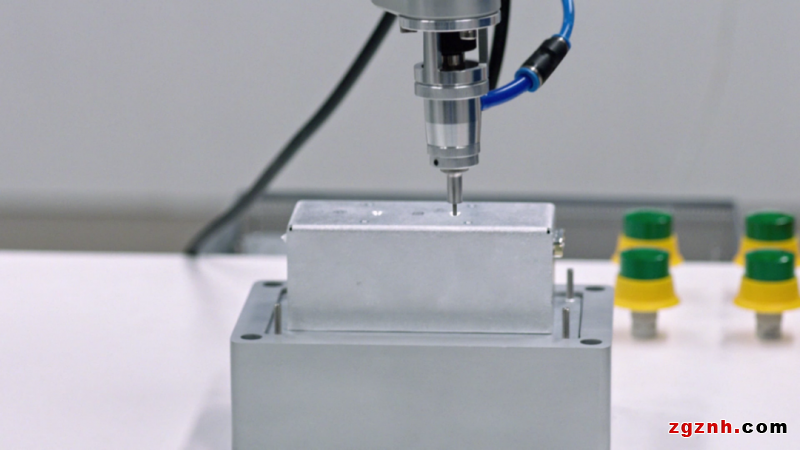
無人化生產(chǎn),是降低生產(chǎn)成本,提升生產(chǎn)效率的有效手段。因此,在汽車保險(xiǎn)杠裝配的環(huán)節(jié),通過導(dǎo)入機(jī)器人,來實(shí)現(xiàn)擰螺絲、緊固等動(dòng)作的全自動(dòng)化。
課題
01 尺寸大、縱深大,傳統(tǒng)機(jī)器人難以覆蓋
前保險(xiǎn)杠,長1900mm*高500mm*寬600mm,傳統(tǒng)機(jī)器人的臂展,難以滿足如此大的縱深與范圍。
02固定位置存在偏差,影響機(jī)器人定位精度
保險(xiǎn)杠依賴人工放置,盡管治具固定,但依然可能存在0.1-5mm級(jí)別的位置誤差,對于之后機(jī)器人的定位與處理精度,存在較大影響。
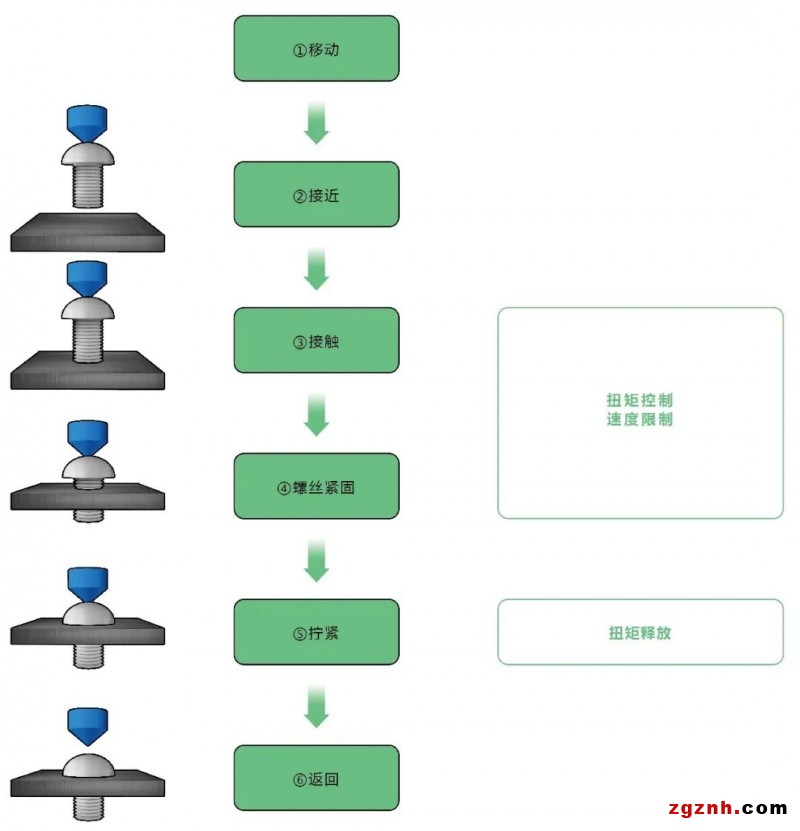
螺絲擰緊,一般主要通過設(shè)置在規(guī)定時(shí)間內(nèi)是否達(dá)到預(yù)設(shè)值的扭矩,如果沒有達(dá)到的話則提示/報(bào)錯(cuò)(滑牙)。
03需要人機(jī)協(xié)作,安全性要求高
類似保險(xiǎn)杠放置等作業(yè),依舊依賴于熟練工,盡管治具固定,因此在人機(jī)協(xié)作的前提下,機(jī)器人要能夠達(dá)到與人近距離工作的安全性能。
解決方案
1、 采用大臂展的協(xié)作機(jī)器人
歐姆龍TM協(xié)作機(jī)器人,臂展可達(dá)1300mm,負(fù)載12KG,可以滿足長1900mm且大縱深的保險(xiǎn)杠工藝要求。

2、 圖像處理系統(tǒng)與識(shí)別方法的優(yōu)化
根據(jù)模式搜索響應(yīng)運(yùn)行配方,并根據(jù)X、Y和θ調(diào)整相對原點(diǎn)偏移,以實(shí)現(xiàn)精確定位和自動(dòng)配方選擇;并針對個(gè)別位置,單獨(dú)定位,運(yùn)行獨(dú)立的擰緊程序,解決位置產(chǎn)品偏差問題。
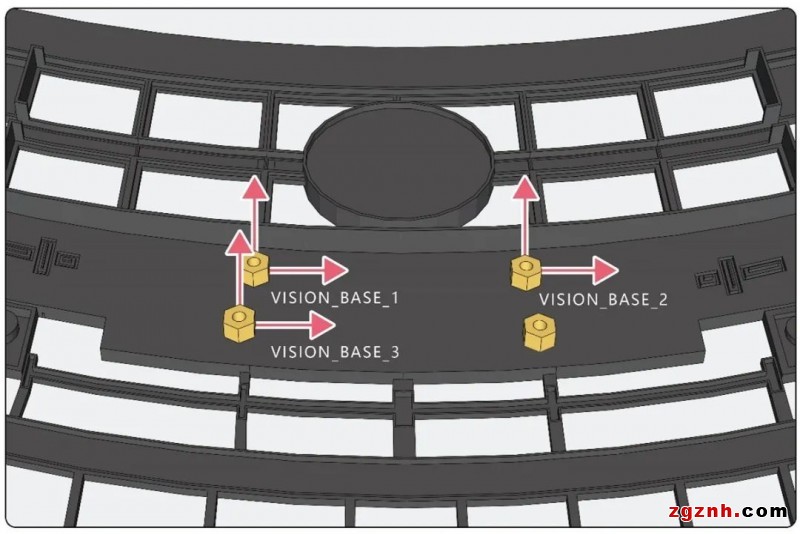
使用歐姆龍TM協(xié)作機(jī)器人獨(dú)特的三點(diǎn)視覺定位技術(shù),在保險(xiǎn)杠的局部,尋找一個(gè)相對固定且有清晰圖標(biāo)的平面,作為建立坐標(biāo)系的標(biāo)記點(diǎn);再通過其自帶的500萬像素相機(jī),對該標(biāo)記點(diǎn)進(jìn)行拍照定位;最終創(chuàng)建3個(gè)Vision base坐標(biāo)點(diǎn),即通過3個(gè)坐標(biāo)點(diǎn)確立一個(gè)基準(zhǔn)面。(如上圖所示)
3、 采用符合國際安全標(biāo)準(zhǔn)的協(xié)作機(jī)器人
歐姆龍TM協(xié)作機(jī)器人,依照最新安規(guī)ISO/TS 15066中人類與機(jī)器人協(xié)作工作安全要求設(shè)計(jì),旨在打造更安全的工作場所。用戶僅需在系統(tǒng)中勾選相應(yīng)的風(fēng)險(xiǎn)部位,機(jī)器人便會(huì)自動(dòng)調(diào)整設(shè)置速度極限。

實(shí)現(xiàn)價(jià)值
1、 無人化:協(xié)作機(jī)器人自動(dòng)完成擰螺絲、緊固等作業(yè)
2、 品質(zhì):無漏擰,且緊固至規(guī)定扭矩1.5Nm,扭矩誤差±10%
【經(jīng)營層】
■ 應(yīng)對無人化工廠的社會(huì)趨勢,率先開展“機(jī)器換人”,提高工廠整體自動(dòng)化的同時(shí),大幅降低了人力成本,品質(zhì)、效率等綜合性能也得到提升,助力打造行業(yè)Top競爭力。
【管理層】
■ TM協(xié)作機(jī)器人自帶500萬像素的視覺系統(tǒng),無需再額外配置,節(jié)省成本。
■ 由協(xié)作機(jī)器人替換人工,生產(chǎn)數(shù)據(jù)以及機(jī)器人運(yùn)行數(shù)據(jù)均可收集、存儲(chǔ)、分析,后續(xù)亦可與MES系統(tǒng)對接,實(shí)現(xiàn)更為宏觀且高效的生產(chǎn)管理。
【工程師層】
■ TM協(xié)作機(jī)器人自帶500萬像素的視覺系統(tǒng),無需單獨(dú)調(diào)試視覺,編程簡單快捷。
■ 優(yōu)化了定位方式、擰緊程序、走位路徑,對部分較難的擰緊位置,單獨(dú)編寫程序,最大程度優(yōu)化擰緊節(jié)拍。
 粵公網(wǎng)安備 44030702001206號(hào)
粵公網(wǎng)安備 44030702001206號(hào)