


在制造業(yè)智能化升級的浪潮中,工業(yè)機器人正面臨精密加工、半導體封裝等高精尖領域對毫米級定位精度的嚴苛挑戰(zhàn)。針對傳統(tǒng)機器人標定技術存在模型靈敏度不足、參數(shù)辨識效率低等行業(yè)痛點,深圳市華成工業(yè)控制股份有限公司創(chuàng)新推出“基于激光跟蹤儀的機器人結構標定技術”,該技術在華為光總線項目、騰訊數(shù)字孿生等項目中成功應用。

控制系統(tǒng)是機器人的“大腦”,決定了機器人的智能化水平和執(zhí)行任務的精度。為此,深圳市華成工業(yè)控制股份有限公司(以下簡稱“華成工控”)提出一種“基于激光跟蹤儀的機器人結構標定技術”,可以有效提升機器人的運動控制精度,更好地應對工業(yè)自動化帶來的挑戰(zhàn)。
華成工控是國內具有代表性和權威性的控制系統(tǒng)開發(fā)商,向市場持續(xù)輸出創(chuàng)新技術和先進產品,“基于激光跟蹤儀的機器人結構標定技術”就是其中之一。2025年4月24—26日,華成工控將亮相“機器人全產業(yè)鏈接會”(FAIR plus 2025)(展位號H8N38),與產業(yè)鏈上下游匯聚一堂,開啟合作共贏的新篇章。
1引言
在制造業(yè)高端化、智能化、綠色化轉型的浪潮中,工業(yè)機器人作為核心生產裝備,其定位精度成為影響產品質量與生產效率的關鍵因素。華成工控聚焦這一痛點,開展 “基于激光跟蹤儀的機器人結構標定方法” 項目研究,致力于突破機器人精度提升的技術瓶頸,為產業(yè)升級注入強勁動力。本文將深入剖析該項目的技術原理、創(chuàng)新成果、應用實踐及行業(yè)影響,探尋其在工業(yè)機器人精度提升領域的關鍵價值與發(fā)展?jié)摿Α?/span>
2 工業(yè)機器人精度需求與現(xiàn)狀剖析
2.1 高精度定位的重要性
在電子信息、新能源、高性能醫(yī)療器械等前沿制造領域,產品制造工藝對精度的要求近乎嚴苛。以高精度工件打磨為例,微小的定位偏差可能導致工件表面粗糙度不達標,影響產品外觀與性能;精密點膠環(huán)節(jié)中,點膠位置的誤差會使電子產品的電氣連接不穩(wěn)定,降低良品率。工業(yè)機器人高精度定位是確保產品質量一致性、提高生產效率、降低生產成本的核心要素,直接關乎企業(yè)在高端制造市場的競爭力。
2.2 現(xiàn)有精度水平的局限
當前,在高精度作業(yè)場景下,人工與半自動化生產方式仍占據(jù)主導。人工操作受限于人體疲勞、技能差異等因素,難以保證穩(wěn)定的高精度作業(yè);半自動化設備雖部分提高了生產效率,但在定位精度上仍存在較大提升空間。工業(yè)機器人因裝配、制造過程引入的運動學誤差,致使絕對定位精度難以滿足高端制造需求,成為制約產業(yè)發(fā)展的關鍵短板。
3 華成工控項目核心技術解析
3.1 運動學辨識模型創(chuàng)新
基于串聯(lián)多連桿運動學理論,華成工控研究團隊構建基礎DH模型,通過齊次變換矩陣描述基坐標系到末端的位姿關系。深入剖析發(fā)現(xiàn)DH模型存在參數(shù)奇異性和易變形問題,微小偏差可能引發(fā)參數(shù)突變,影響模型準確性。為解決這一難題,團隊創(chuàng)新提出MDH模型,優(yōu)化模型參數(shù),確保運動學參數(shù)的完備性,降低模型對微小偏差的敏感性,為后續(xù)精確標定奠定堅實基礎。
同時,團隊聚焦 “機器人完備運動學參數(shù)” 關鍵技術,建立最小參數(shù)集模型。通過合理篩選和精簡運動學參數(shù),在不損失關鍵信息的前提下,大幅降低運動學辨識的復雜度,提高參數(shù)辨識效率與準確性,使機器人運動學模型更加簡潔高效。
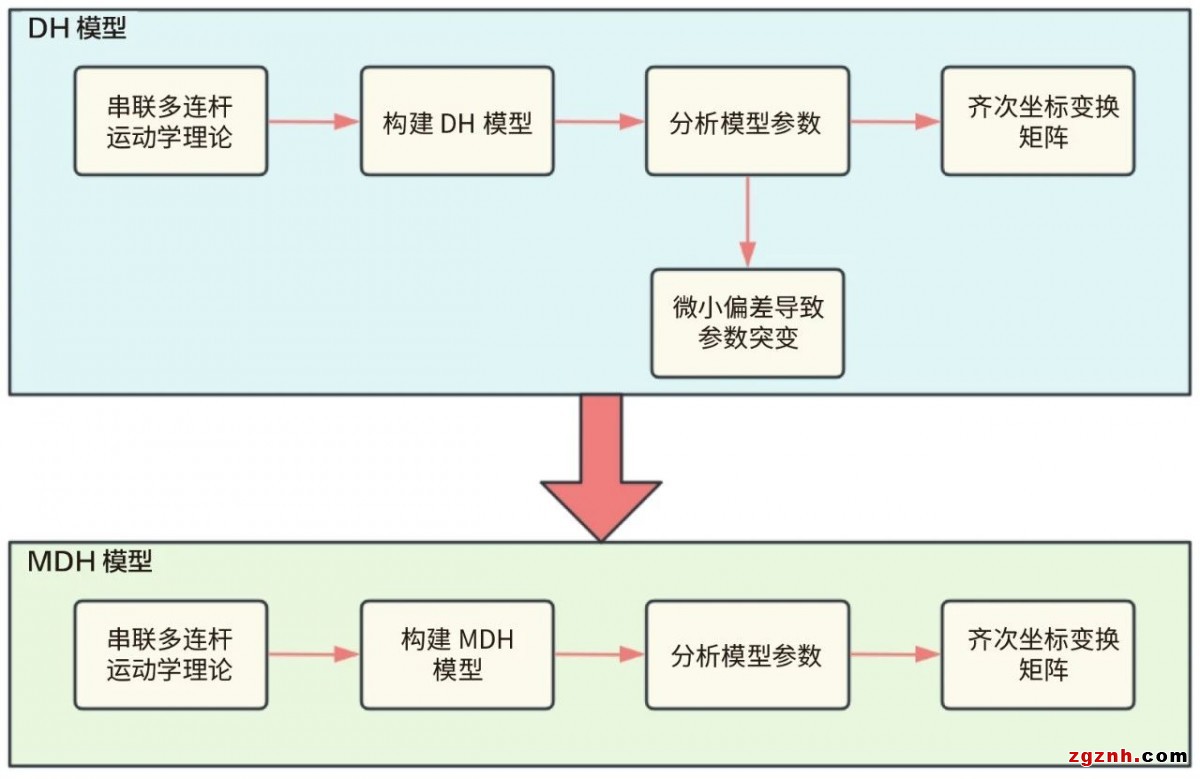
圖1 建立機器人完備運動學參數(shù)
3.2 誤差模型深度研究
結合運動學模型與微分變換法,華成工控推導出雅可比矩陣,并據(jù)此建立多種適用于機器人標定的誤差模型。位置誤差模型用于分析運動學參數(shù)誤差導致的微分攝動,直觀反映參數(shù)變化對機器人末端位置的影響;相對距離誤差模型針對單機器人誤差標定場景,能夠精準測量機器人各關節(jié)間相對距離的誤差;距離平方誤差模型則有效消除機器人運動學標定中的模型奇異問題,確保標定過程的穩(wěn)定性和可靠性;基于牛頓迭代識別的距離和距離平方差最小約束模型,以兩點間距離最小為約束條件構建運動學方程,進一步優(yōu)化標定精度。
通過對比分析不同誤差模型的特點與適用場景,團隊精準提取出最適合機器人標定的誤差模型,為實現(xiàn)高精度標定提供了有力的理論支撐。在實際應用中,根據(jù)機器人的作業(yè)環(huán)境、精度要求等因素,靈活選擇合適的誤差模型,能夠顯著提升標定效果。
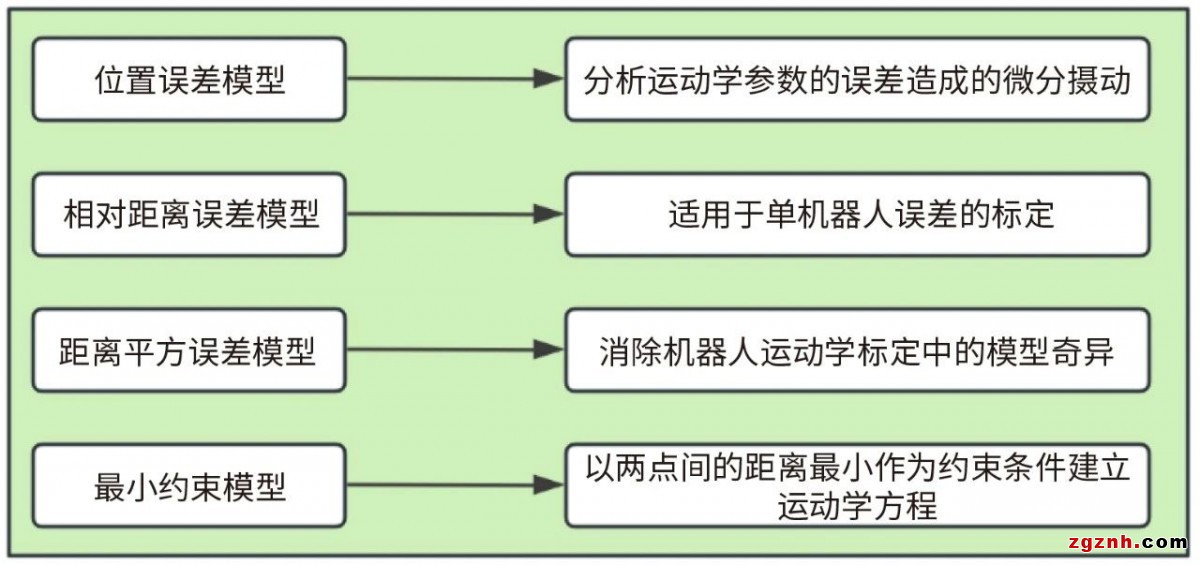
圖2 分析誤差模型的適應性
3.3 運動學參數(shù)誤差分析
全面剖析運動學參數(shù)誤差來源,涵蓋溫度、摩擦、外部環(huán)境等外部因素,以及桿長、偏角、零位誤差等內部因素。針對各關節(jié)零位偏差、扭角偏差、桿長和偏距等參數(shù),開展敏感性分析,繪制誤差分布曲線。研究發(fā)現(xiàn),部分關節(jié)零位偏差對機器人末端位置誤差影響較大,在標定過程中需重點關注和修正;桿長和偏距的微小變化也會累積導致顯著的定位誤差。通過精準確定對運動學誤差產生主要影響的參數(shù),為優(yōu)化標定策略、提高機器人結構精度提供了關鍵依據(jù)。
在實際操作中,根據(jù)誤差分布曲線,對關鍵參數(shù)進行重點監(jiān)測和調整,能夠有效降低誤差積累,提升機器人整體精度。
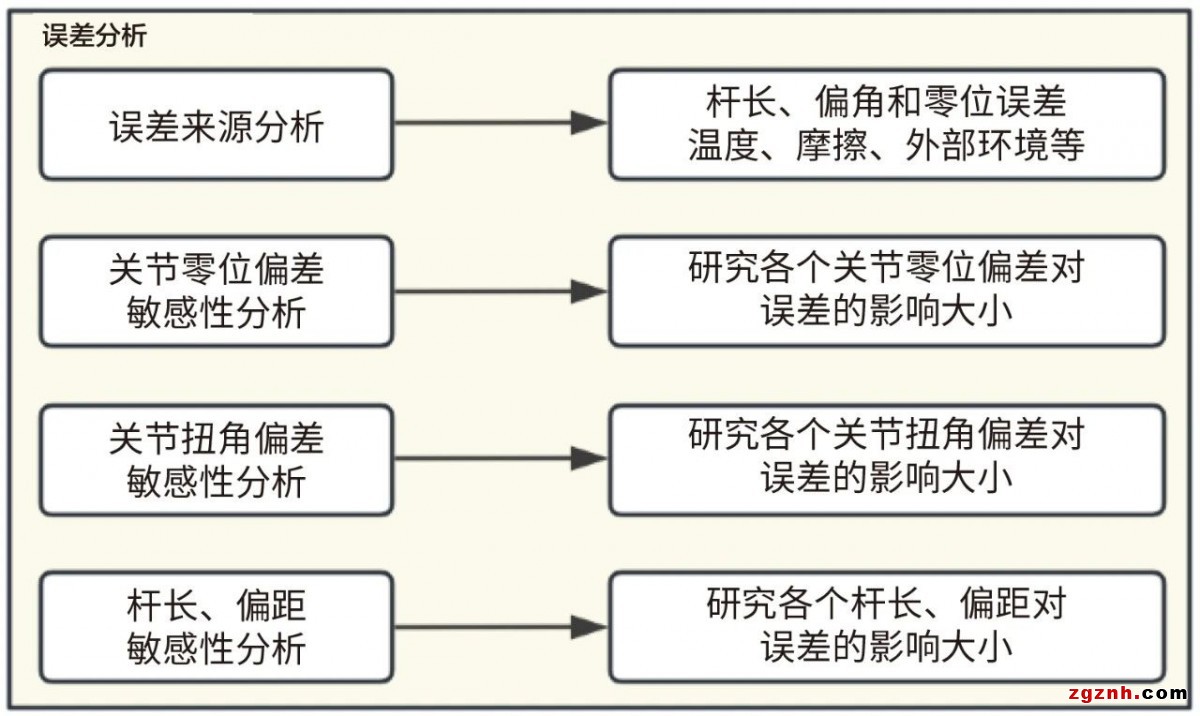
圖3 研究運動學參數(shù)誤差主要來源
3.4 參數(shù)辨識方法優(yōu)化對多種參數(shù)辨識方法進行深入研究,對比可迭代最小二乘法、遺傳算法、模擬退火算法等的優(yōu)劣,分析其對辨識結果的影響。最終選擇可迭代最小二乘法,并結合項目需求進行優(yōu)化。該方法通過對采集數(shù)據(jù)的多次迭代計算,逐步逼近真實參數(shù)值,有效提高了參數(shù)辨識的準確度。同時,團隊創(chuàng)新性地提出基于自適應遺傳算法的測量點位生成方法,根據(jù)機器人運動學特點和標定精度要求,智能生成最優(yōu)測量點位,大幅減少測量時間和工作量,提高標定效率;構建基于卡爾曼濾波的位置估算方法,對激光跟蹤儀采集的位置數(shù)據(jù)進行濾波處理,有效消除機械振動、環(huán)境噪聲等干擾因素導致的位置偏差,確保數(shù)據(jù)的準確性和穩(wěn)定性;提出基于冗余參數(shù)剔除的運動學參數(shù)辨識方法,在降低擾動誤差的同時,提高參數(shù)辨識的準確性和魯棒性,使機器人在復雜工況下仍能保持高精度運行。
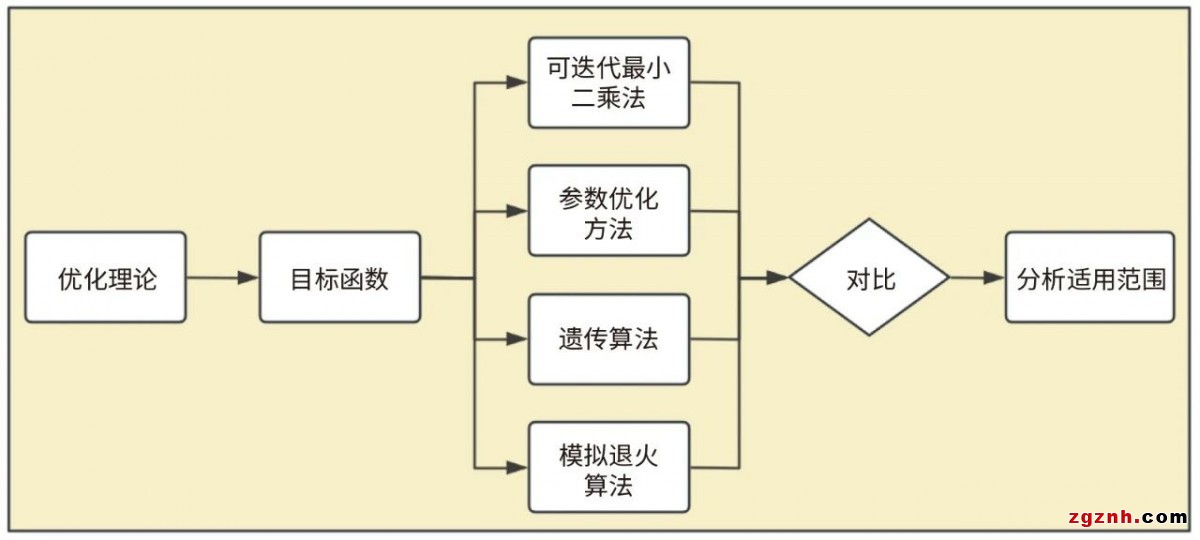
圖4 研究不同辨識算法的補償效果
4華成工控研發(fā)實力與項目支撐
4.1 綜合實力強勁華成工控是運動控制技術、工業(yè)機器人系統(tǒng)和驅控一體領域的領軍企業(yè)。自成立以來,華成工控專注于技術研發(fā)與產品創(chuàng)新,于2021年成功掛牌新三板,展現(xiàn)出強大的資本實力與發(fā)展?jié)摿ΑHA成工控擁有10000平方米的現(xiàn)代化辦公場地,為研發(fā)、生產和運營提供了充足的空間。員工近200人,其中研發(fā)人員占比近半數(shù)。高素質的研發(fā)團隊為項目提供了堅實的智力支持,確保技術創(chuàng)新持續(xù)推進。
4.2 技術積累深厚
華成工控在工業(yè)控制領域深耕多年,積累了豐富的技術成果。在高精度伺服電批控制、高能量密度伺服驅動器設計、基于力觸的人機協(xié)作、基于激光儀的機器人參數(shù)標定、基于機器視覺的快速識別定位、多軸驅控一體控制器設計、基于機器學習的機械臂未知環(huán)境自適應軌跡規(guī)劃,以及基于力反饋的多關節(jié)機器人高速高精度運動控制等核心技術領域取得突破,并獲得多項CE認證,涵蓋EC通用系列、機器人一體柜、伺服電批、低壓伺服產品等。截至目前,華成工控擁有知識產權近1000項。這些技術成果為 “基于激光跟蹤儀的機器人結構標定方法” 項目提供了堅實的技術儲備,促進了項目的快速推進和技術創(chuàng)新。
4.3 廣泛的應用案例與合作
華成工控的產品廣泛應用于多個行業(yè),機器人鎖附工作站、格力沖壓聯(lián)機生產場景、浙江朗成科技車床自動化等項目都取得顯著成效。此外,華成工控與華為、比亞迪、格力、騰訊等知名企業(yè)開展深度合作,參與華為光總線項目、騰訊云數(shù)字孿生項目等。通過與行業(yè)巨頭的合作,華成工控不僅能夠及時了解市場需求和行業(yè)發(fā)展趨勢,還能借助各方優(yōu)勢資源,加速項目成果的轉化和應用,提升項目的市場價值和行業(yè)影響力。
在騰訊云數(shù)字孿生項目中,華成工控利用其先進的機器人標定技術,為數(shù)字孿生模型提供高精度的機器人運動數(shù)據(jù),實現(xiàn)了虛擬與現(xiàn)實場景的高度匹配,提升了生產過程的可視化和智能化水平。
4.4 先進的研發(fā)儀器與測試平臺
為確保項目研究的科學性和準確性,華成工控配備了先進的研發(fā)儀器和測試平臺。FARO Vantage-E激光跟蹤儀作為核心測量設備,具備高精度、高速度的測量能力,能夠實時獲取機器人末端的位置信息;視覺鎖附測試臺、碼垛測試臺、打磨測試臺、點膠測試臺等專業(yè)測試平臺,模擬不同的工業(yè)應用場景,對機器人在實際作業(yè)中的性能進行全面測試;EFT測試臺、溫濕度測試箱、靜電測試臺等輔助設備,用于測試機器人在不同環(huán)境條件下的穩(wěn)定性和可靠性。這些先進的儀器設備和測試平臺為項目研究提供了有力的技術支持,保障了研究成果的質量和可靠性。
在標定測試過程中,利用FARO Vantage-E激光跟蹤儀對機器人末端位置進行高精度測量,結合測試平臺收集的數(shù)據(jù),能夠準確分析機器人的運動學誤差,為標定算法的優(yōu)化提供精準數(shù)據(jù)支持。
5項目預期成果與社會效益
5.1 顯著的技術指標提升
項目致力于實現(xiàn)機器人標定技術的重大突破,預期標定后絕對定位精度提高70%,大幅提升機器人在高精度作業(yè)場景中的應用能力;標定時間控制在20分鐘以內,顯著提高生產效率,減少設備停機時間;實現(xiàn)標定流程自動化,降低人工操作成本和誤差,提高標定結果的準確性和一致性。標定完成后生成詳細的結果報告,為機器人后續(xù)維護和優(yōu)化提供重要依據(jù)。
在實際應用場景中,以某電子制造企業(yè)的精密點膠工序為例,采用華成工控的標定技術后,點膠位置精度從原來的±0.1mm提升至±0.03mm,產品良品率從85%提高到95%以上,生產效率提高了30%,有效降低了生產成本。
5.2 豐富的學術成果產出
項目預期在知識產權方面取得豐碩成果,計劃申請知識產權不少于10項,其中發(fā)明專利不少于2項、實用新型專利不少于3項、軟件著作權不少于5項。這些知識產權成果不僅是項目技術創(chuàng)新的重要體現(xiàn),還將為公司在機器人標定領域構筑堅實的技術壁壘,提升公司的核心競爭力。同時,項目研究過程中形成的技術論文和研究報告,將為行業(yè)技術發(fā)展提供理論參考和實踐經驗,推動機器人標定技術的學術研究和產業(yè)應用不斷向前發(fā)展。
5.3 積極的社會效益貢獻
作為機器人控制系統(tǒng)的關鍵配套軟件,項目成果在一定程度上填補了機器人標定軟件的空白,為下游本體廠商制造更精密的機器人提供有力技術支撐,促進機器人產業(yè)整體升級。項目實施過程中,預計新增就業(yè)人員不少于10人,其中培養(yǎng)工程師3名、技術人員5名、研究生2名。通過人才培養(yǎng),為機器人產業(yè)發(fā)展注入新鮮血液,提升行業(yè)整體技術水平和創(chuàng)新能力,推動產業(yè)可持續(xù)發(fā)展。
6行業(yè)應用前景與展望
6.1 拓展高端制造應用邊界
隨著制造業(yè)向高端化邁進,對工業(yè)機器人精度要求持續(xù)攀升。華成工控的機器人結構標定技術為高端制造領域帶來了新的解決方案。在航空航天零部件加工中,高精度的機器人標定能夠確保復雜曲面零件的加工精度,提高零部件的裝配精度和可靠性;在半導體制造領域,滿足芯片制造過程中對光刻、封裝等環(huán)節(jié)的超高精度定位需求,推動半導體產業(yè)技術升級。機器人標定技術還可應用于精密模具制造、醫(yī)療器械制造等行業(yè),助力企業(yè)突破精度瓶頸,提升產品質量和市場競爭力,拓展工業(yè)機器人在高端制造領域的應用邊界。
6.2 助力產業(yè)智能化升級
在工業(yè)4.0和智能制造的大背景下,機器人作為智能化生產的核心設備,其精度的提升對于實現(xiàn)生產過程的智能化、自動化至關重要。華成工控的標定技術與人工智能、大數(shù)據(jù)等技術深度融合,能夠實現(xiàn)機器人的自主感知、自主決策和自主調整。通過實時監(jiān)測機器人的運動狀態(tài)和誤差數(shù)據(jù),利用人工智能算法進行分析和預測,提前調整機器人參數(shù),確保機器人始終保持高精度運行。這將極大地提高生產系統(tǒng)的智能化水平,減少人工干預,降低生產成本,提高生產效率和產品質量,推動整個制造業(yè)向智能化、柔性化方向升級。
6.3 推動行業(yè)技術革新
華成工控的項目成果為機器人標定技術領域樹立了新的標桿,其創(chuàng)新的技術方法和理念將激發(fā)行業(yè)內其他企業(yè)和研究機構的創(chuàng)新熱情。通過技術交流與合作,推動機器人運動學模型優(yōu)化、誤差補償算法改進、測量設備升級等相關技術的不斷發(fā)展。行業(yè)內將形成良性競爭和創(chuàng)新氛圍,促使更多企業(yè)加大研發(fā)投入,共同攻克機器人精度提升的技術難題,推動整個機器人產業(yè)技術水平的不斷革新和進步。
7結論
華成工控 “基于激光跟蹤儀的機器人結構標定方法” 項目,憑借其在技術研發(fā)、項目實施、成果轉化等方面的卓越表現(xiàn),為工業(yè)機器人精度提升提供了創(chuàng)新解決方案。項目成果不僅滿足了高端制造領域對機器人高精度定位的迫切需求,還將推動機器人產業(yè)智能化升級和技術革新,創(chuàng)造顯著的經濟效益和社會效益。隨著技術的不斷完善和應用領域的拓展,該項目有望在機器人產業(yè)發(fā)展中發(fā)揮更為重要的作用,成為推動制造業(yè)高質量發(fā)展的關鍵力量,引領工業(yè)機器人精度提升技術邁向新的高度。
FAIR plus 2025是一場展示機器人開發(fā)技術的盛會,針對產業(yè)環(huán)節(jié)定向邀約做實物展示的企業(yè)超150家。與華成工控相似,以控制系統(tǒng)為代表的核心零部件企業(yè)將匯聚一堂,交流切磋,為全球制造業(yè)的智能化轉型貢獻中國智慧和中國方案。
 粵公網(wǎng)安備 44030702001206號
粵公網(wǎng)安備 44030702001206號